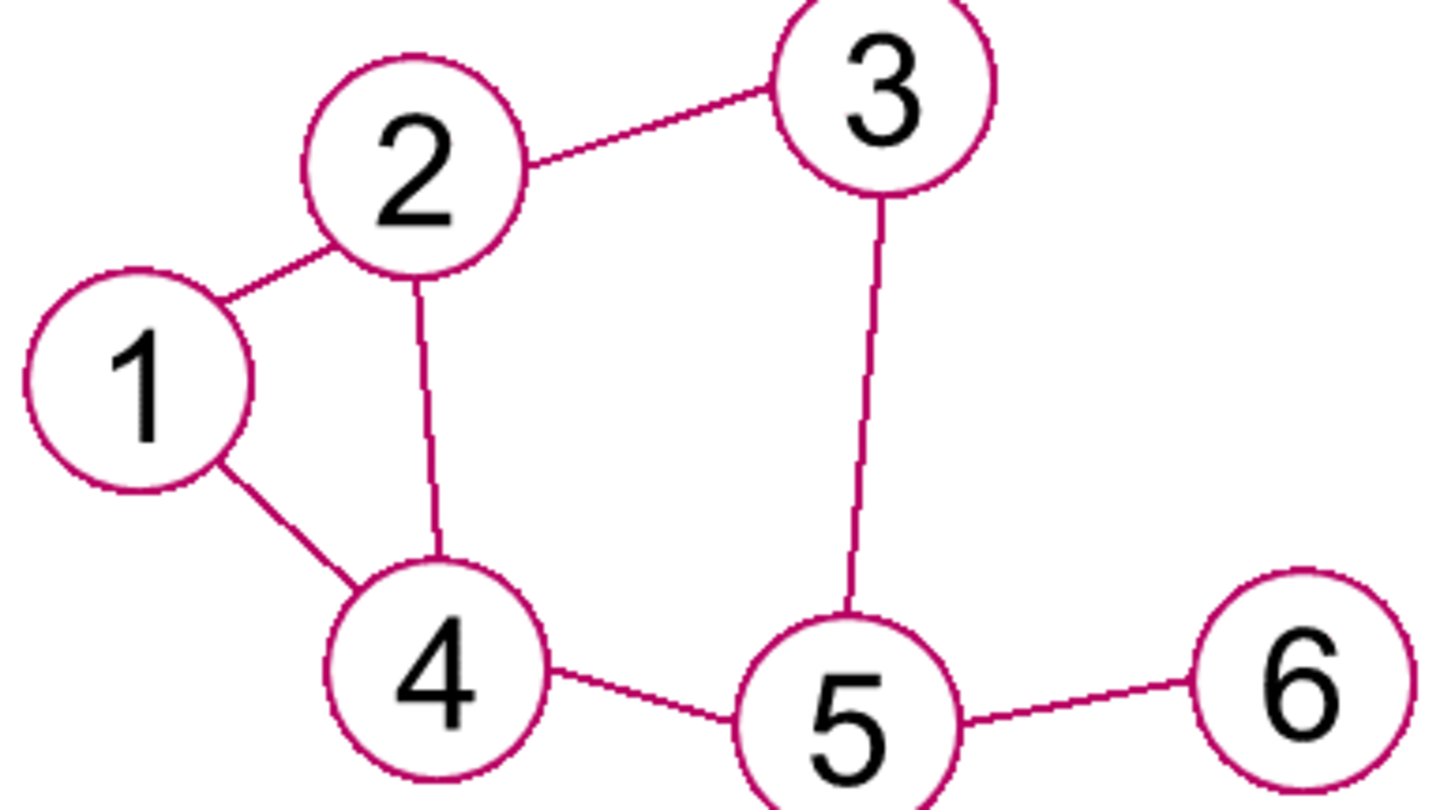
Wie wir sicher schon erkannt haben, folgen wir jetzt immer den drei Schritten bis alle Knoten permanent besucht wurden:
- Knoten mit der kleinsten Gewichtung besuchen
- Nachbarknoten markieren
- Heimatknoten markieren.
Zwei Fälle sind noch zu erwähnen:
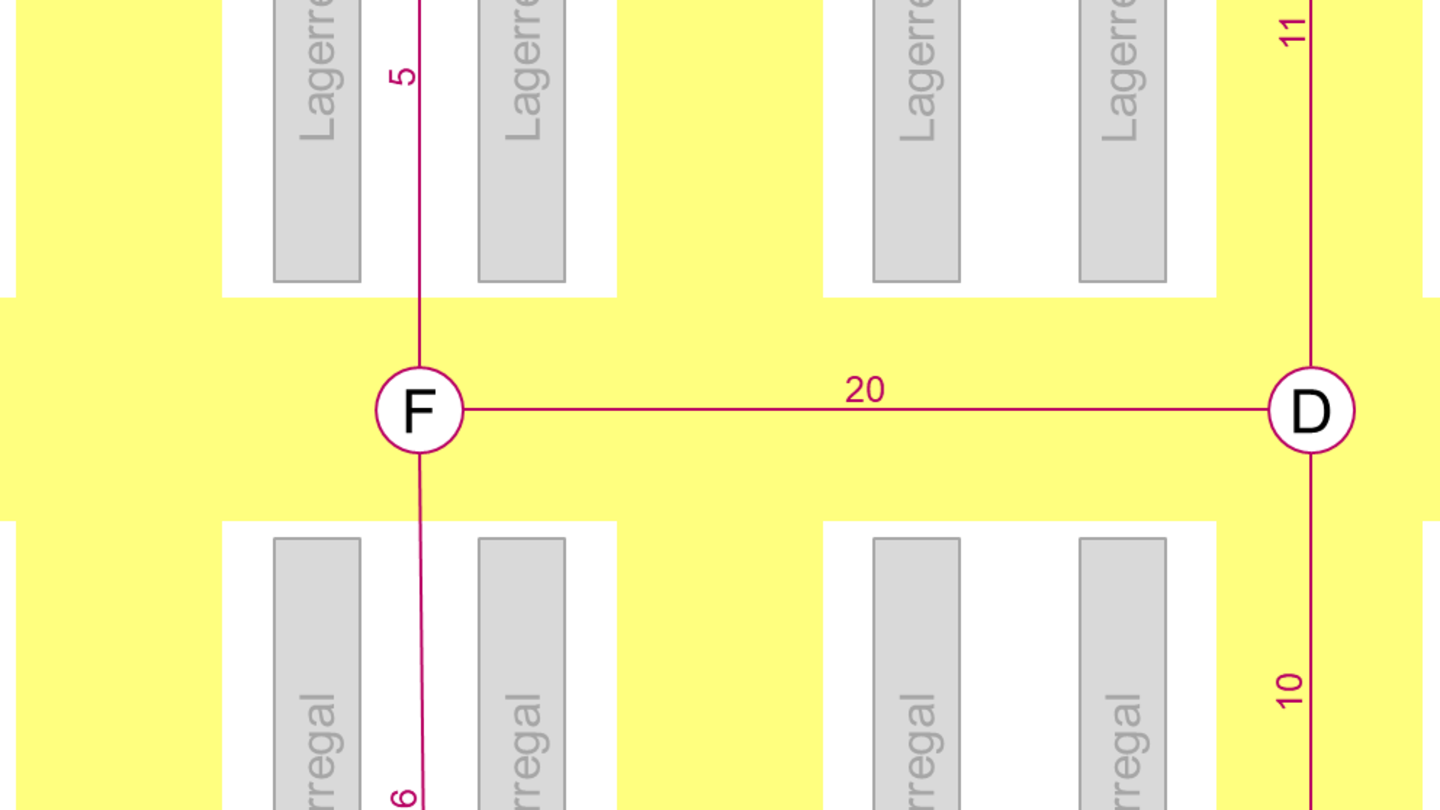
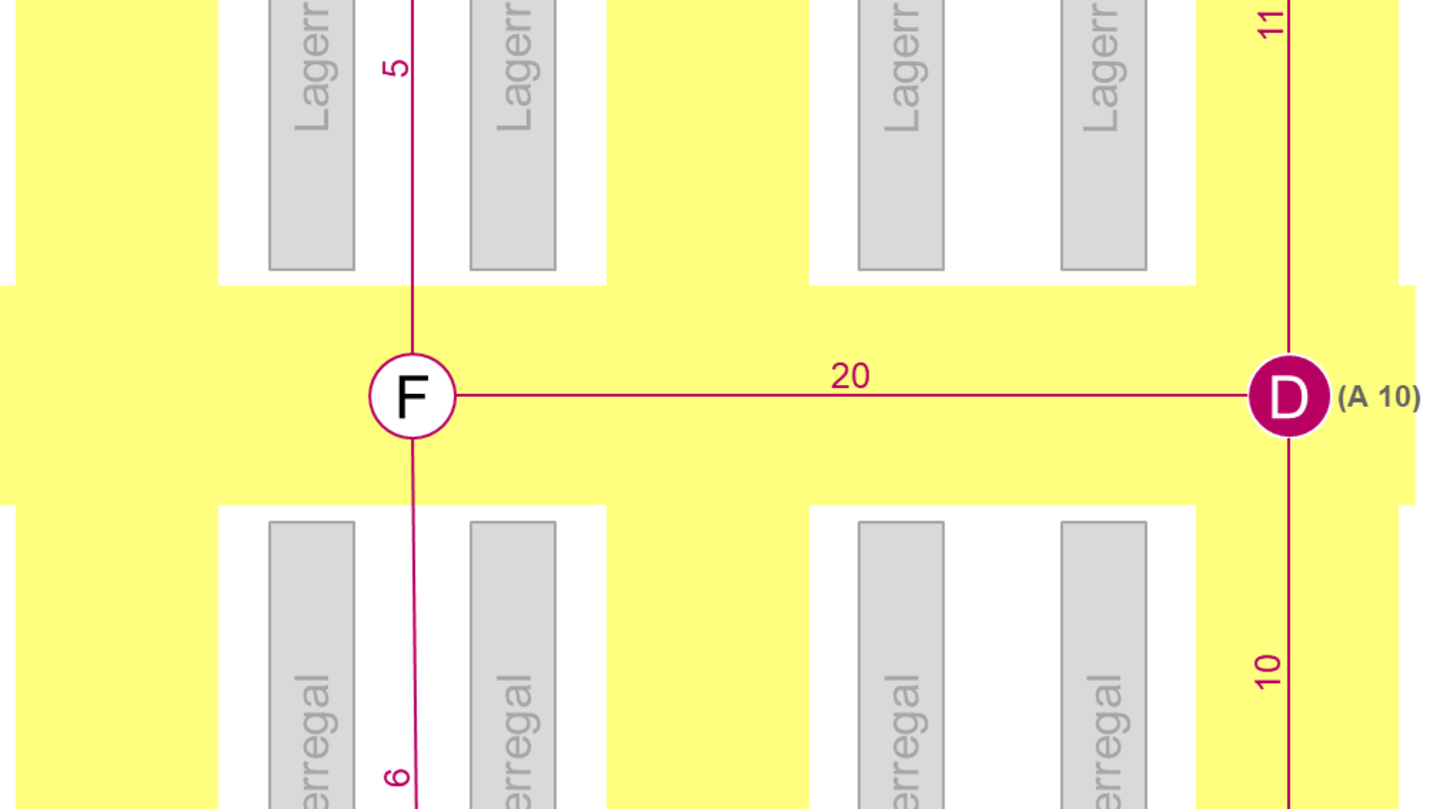
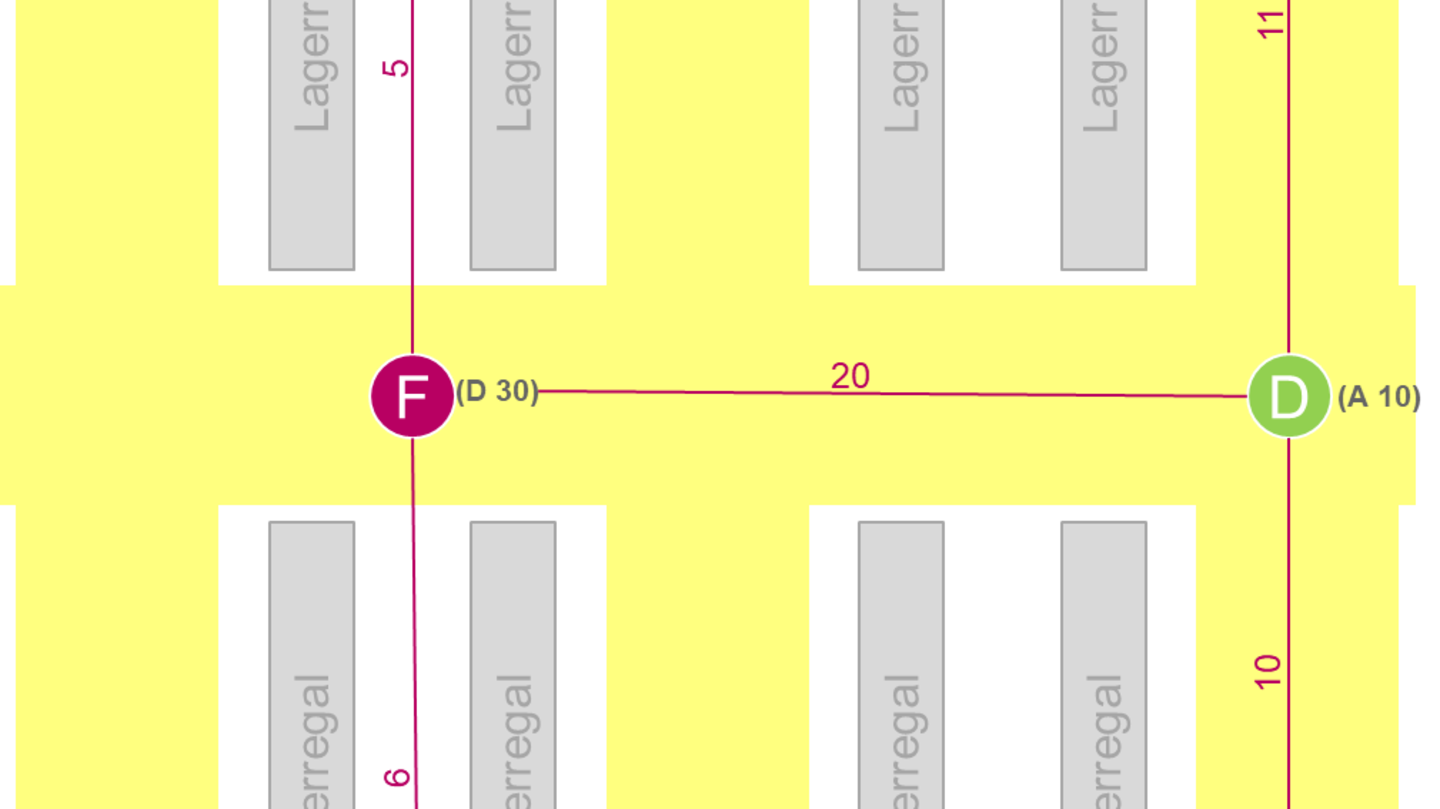
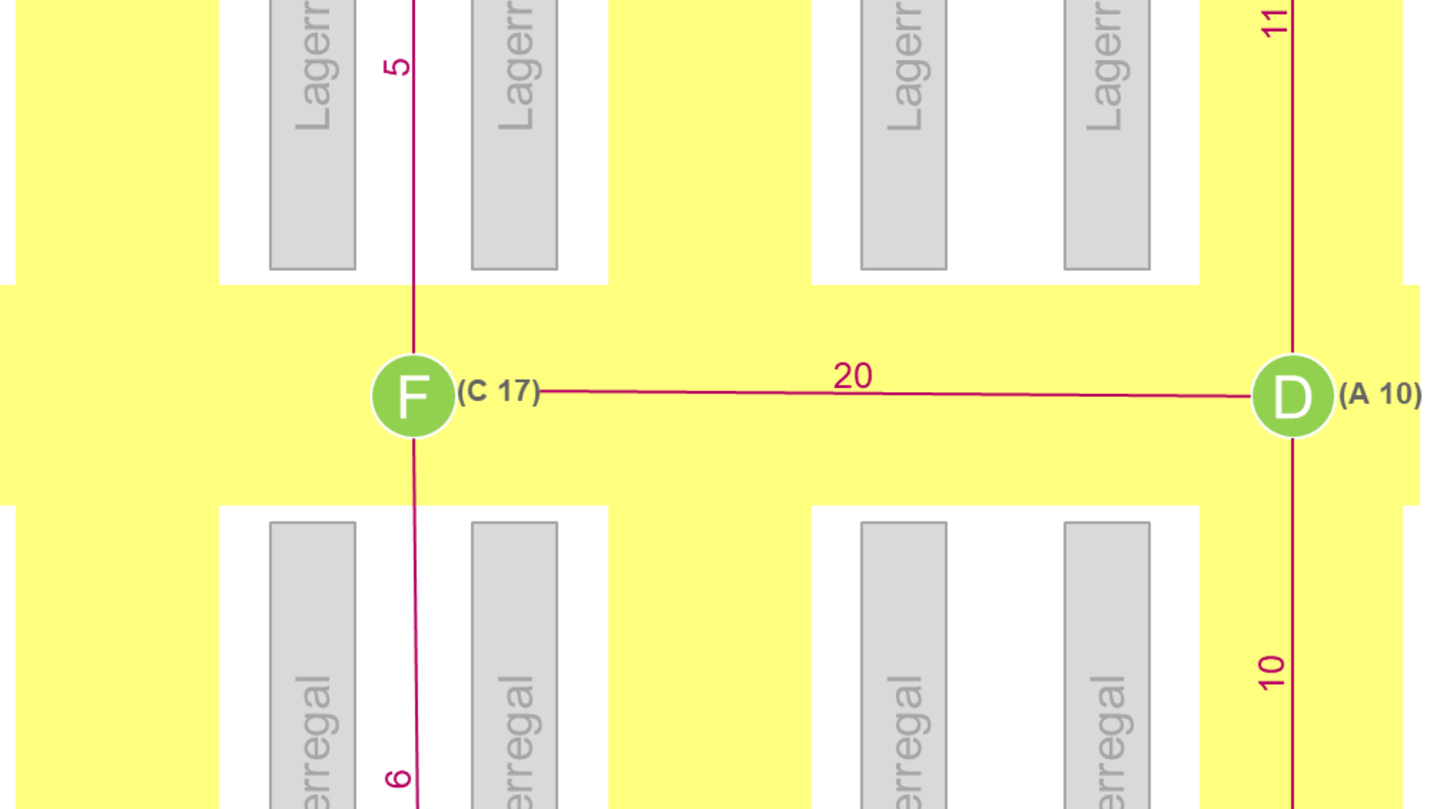
Treffen wir auf einen Konten, der bereits als „provisorisch besucht“ markiert ist, aber haben von unserem neuen Pfad eine kleinere Wichtung, dann ändern wir die bestehende auf die neue Wichtung.
Falls wir einen Knoten immer nur besuchen, diesen aber nie als Heimatknoten auswählen, setzen wir diesen auf „permanent besucht“, sobald alle seine Nachbarn „permanent besucht“ wurden.
Am Ende sollten alle Knoten als „permanent besucht“ markiert (also grün) sein. Um den kürzesten Pfad zu ermitteln, gehen wir jetzt vom Zielknoten einfach rückwärts entsprechend unseren Knotenbeschriftungen.