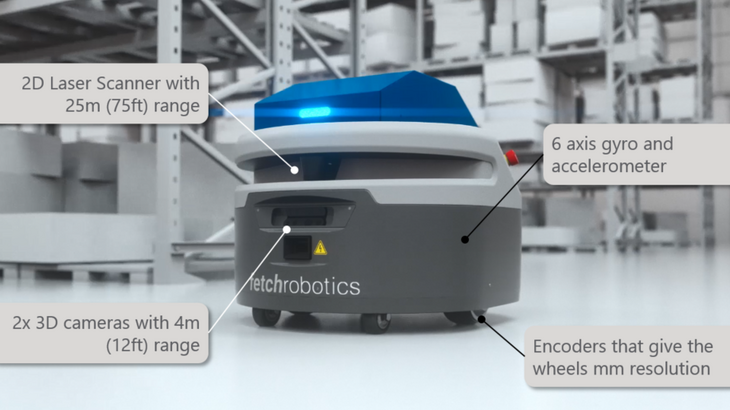
Anhand der bisher beschriebenen Messsysteme misst der AMR seine Bewegungen und berechnet daraus seinen ungefähren Standort im Lager. Aber aufgrund von zum Beispiel abgenutzten Rädern (und damit einen kleineren Umfang) kann es zu geringen Abweichungen kommen. An sich ist eine geringe Abweichung kein Problem, aber auch eine geringe Abweichung, die 100-mal auftritt, summiert sich zu einer großen Abweichung.
Man kann dies auch selber ausprobieren indem man in einem Lager zwei Punkte markiert, die voneinander 10 m entfernt sind und keine Hindernisse zwischen einander haben. Man stellt sich nun an den einen Punkt, schließt die Augen und geht 10-mal von einem zum anderem Punkt. Wenn man die Augen wieder öffnet, wird man erstaunt sein, wie weit man doch vom eigentlich Punkt entfernt ist. Selbst wenn man pro Strecke nur 5 cm zu kurz gelaufen ist, macht das bei 10-mal hin und her am Ende doch schon 1 m Unterschied.
Das gleiche Problem haben auch AMRs. Aber genauso wie wir Menschen, die ihre Umgebung mit ihren Augen sehen und das Gesehene mit ihren anderen Sinnen abgleichen, sind AMRs mit Sensoren ausgestattet, die die Aufgaben unserer Augen übernehmen.
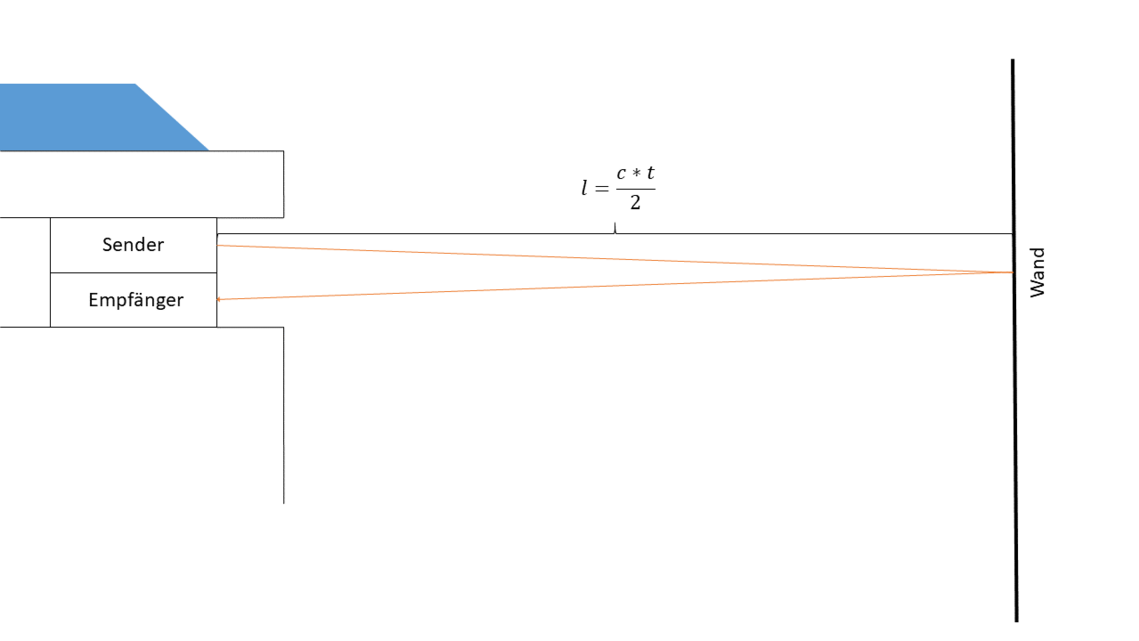
Zum einem besitzt der Fetch 100 einen 2D-Laserscaner (LIDAR). Dieser arbeitet wie ein Radar und misst mit Lichtwellen anstatt mit Radiowellen den Abstand zu Gegenständen. Der Laserscanner beim Fetch 100 sitzt auf einer Höhe von ca. 30 cm über dem Boden, sendet in einem Winkel von 220 ° Lichtwellen aus und empfängt deren zurückkommende Reflexionen. Anhand der Laufzeit der Lichtwellen kann die Entfernung des reflektierenden Körpers bis zu einer Distanz von 25 m berechnet werden.